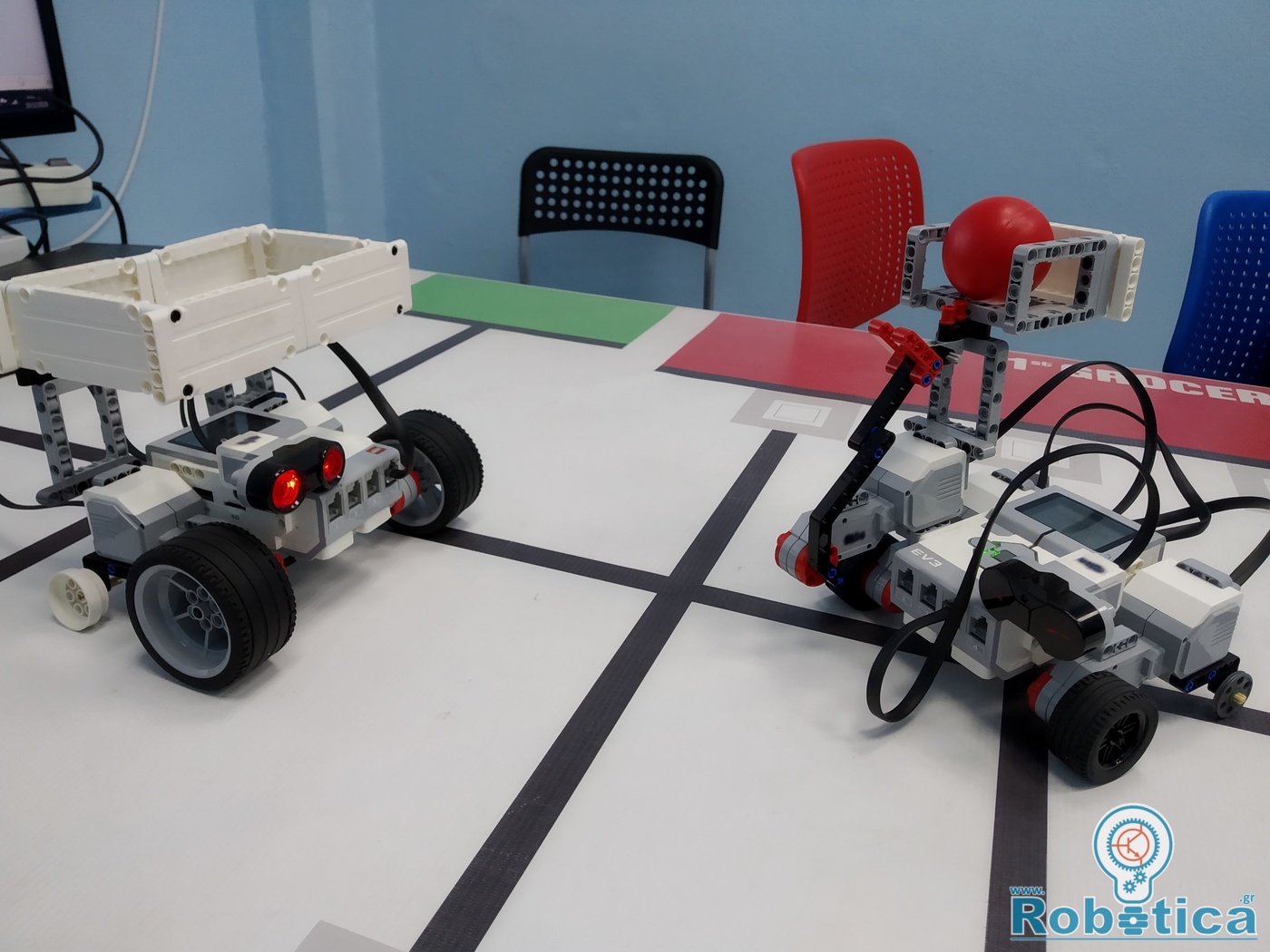
Τα παιδιά χωρίστηκαν σε δύο ομάδες. Η μια ομάδα κατασκεύασε ένα ρομπότ που είχε στόχο να βάλει μια μπάλα μέσα σε ένα καλάθι και το οποίο προγραμμάτισαν να κινείται με χειριστήριο. Η αντίπαλη ομάδα κατασκεύασε μια κινητή μπασκέτα στην οποία προσάρμοσε αισθητήρα απόστασης. Όταν ο παίχτης πλησίαζε την μπασκέτα σε απόσταση μικρότερη από 20cm, αυτή άρχιζε να κινείται με τυχαίο τρόπο και μετά από λίγη ώρα σταματούσε. Αν τον εντόπιζε πάλι άρχιζε πάλι να κινείται. Ο παίχτης για να βάλει καλάθι έπρεπε να την προσεγγίσει είτε από σημείο που δεν τον έβλεπε ο αισθητήρας απόστασης, είτε να κινηθεί γρήγορα για να προλάβει να βάλει το καλάθι του.